
SAE Variateur de vitesse
Description de l'article de blog :
4/1/20255 min read
SAE Variateur de vitesse

Un client souhaite modifier sa station de lavage (actuelle) pour le nettoyage de cuves en plastique. Elle nécessite des débits très différents en fonction du volume de ses cuves. En effet, pour certains modèles, un débit de 450 litres d’eau à l’heure suffit et pour d’autres, il faut 5000 litres d’eau à l’heure.
Le groupe motopompe est alimenté directement sur le réseau EDF 400V tri. Par conséquent, le moteur n’a pas de variation de sa vitesse et le débit de la pompe est ajusté en fermant plus ou moins une vanne. Or, cela génère des pertes d’énergies inutiles (des pertes de charges) quand le débit d’eau est faible. C’est un peu comme si vous ouvrez la fenêtre de votre appartement quand vous avez trop chaud au lieu de baisser le thermostat du radiateur. Or, ce système peut fonctionner en moyenne 14 heures par jour sur plus de 120 jours par an et cela fait beaucoup de kW.h gaspillés !
Pour éviter ces pertes d’énergétiques, le groupe motopompe devra être alimenté par un variateur de vitesse. En effet, ce variateur fera tourner le moteur asynchrone triphasé à la vitesse idéale que permet d’obtenir le débit choisi. Les pertes de charges dans le circuit seront alors minimisées et la puissance absorbée par le moteur pourra être divisée par un nombre supérieur à 4.
On souhaite donc :
•Alimenter notre système grâce à un variateur de vitesse.
•Limiter ces pertes de charges.
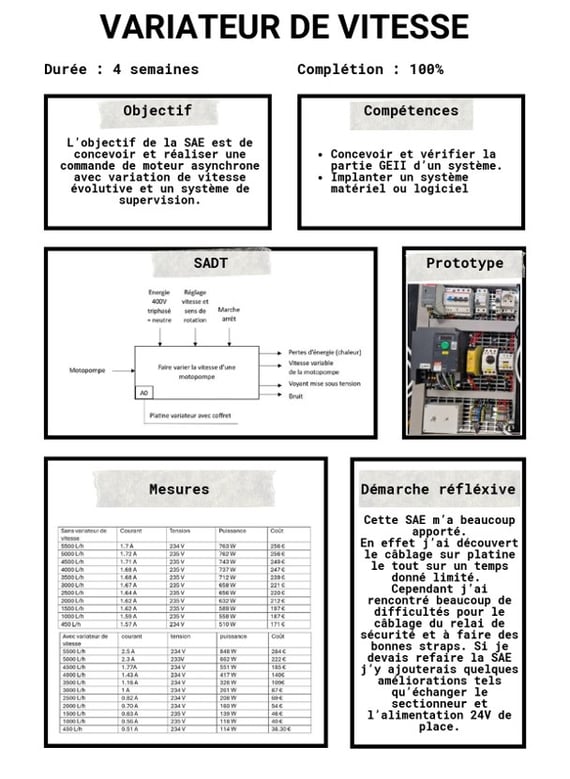
L’objectif de la SAE est donc la conception et la réalisation d’une commande de moteur asynchrone avec variation de vitesse évolutive et un système de supervision.
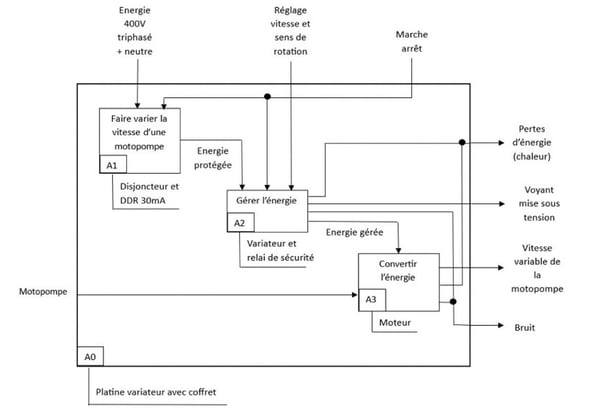
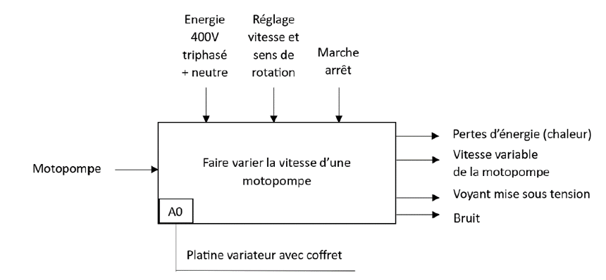
SADT
La méthode SADT est un outil graphique pour analyser, comprendre et communiquer, exprimant un point de vue d'un problème complexe.
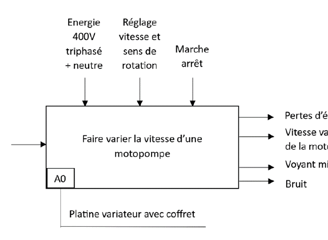
SADT de niveau 1
SADT de niveau 0
Schémas
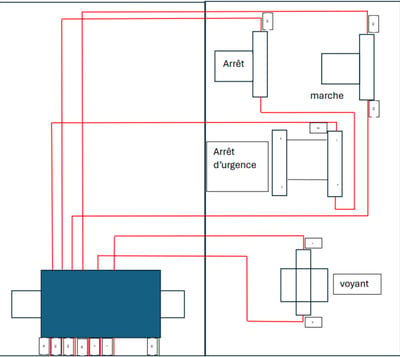
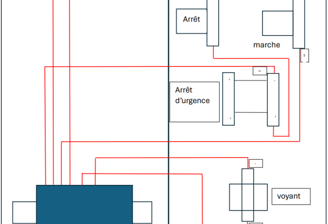
Schéma électrique réalisé sur QElectroTech
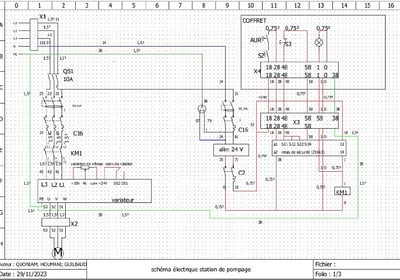
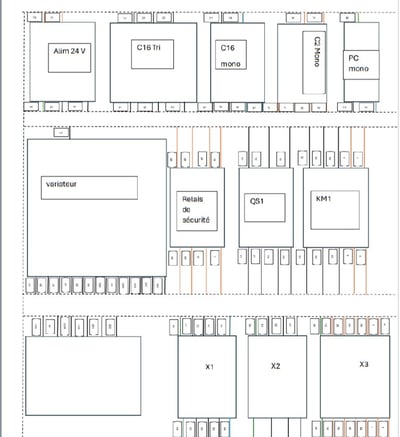
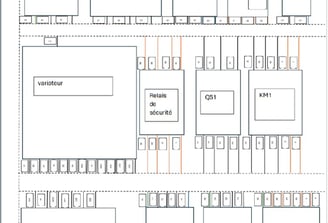
Schéma d'implantation variateur
Schéma d'implantation coffret
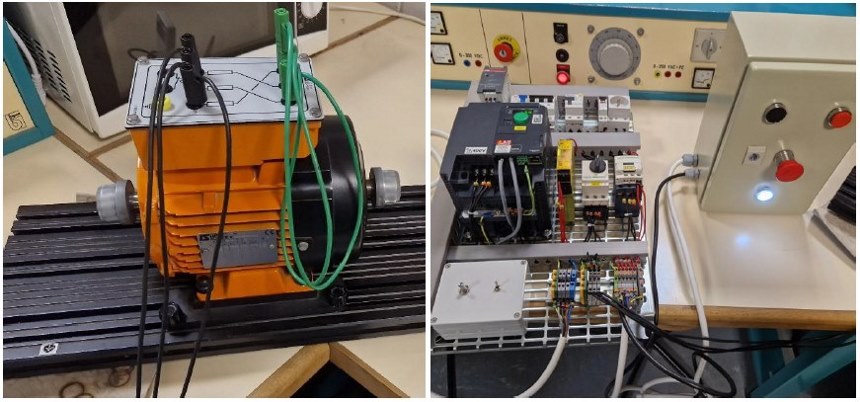
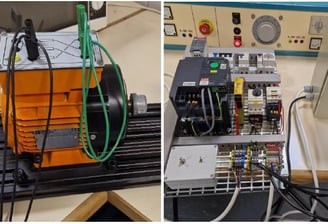
Prototype
Afin de tester notre platine, nous avons dans un premier temps utilisé un moteur que l’on a branché en montage étoile (car on a du 400V tri).
En mettant sous tension, on devait vérifier que nos différents voyants s’allument (voyant du coffret) et le bon fonctionnement du potentiomètre et de l’interrupteur (bon sens de rotation).
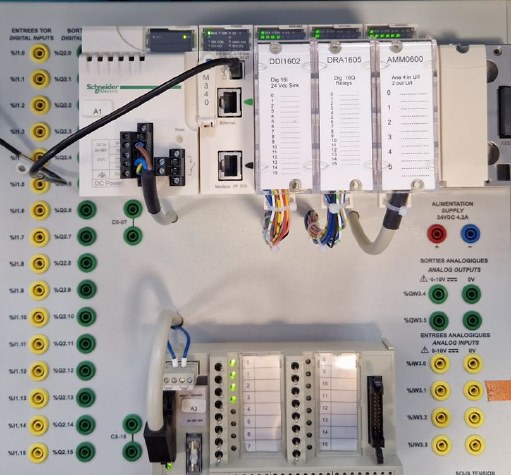
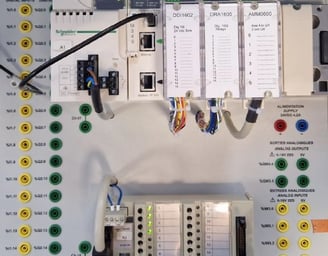
Supervision
Pour pouvoir faire communiquer notre variateur, il nous faut un automate. Celui-ci possède différents protocoles tels que le TCP/IP ou le MODBUS. Cependant, le variateur ne possédant pas le protocole TCP/IP, nous alors donc réaliser la communication à partir du protocole MODBUS.
Programmation
Pour réaliser la programmation, on utilise le logiciel UNITYPro. En effet, UNITY PRO permet la programmation d’API à l’aide d’un simulateur intégré.
Notre objectif ici est de commander notre platine à partir d’un écran de supervision en n’importe quel langage de programmation (ici LD).
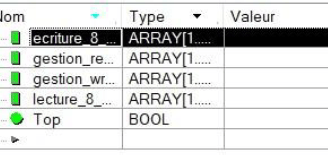
On initialise les variables élémentaires :
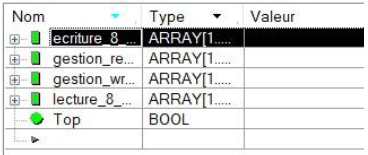
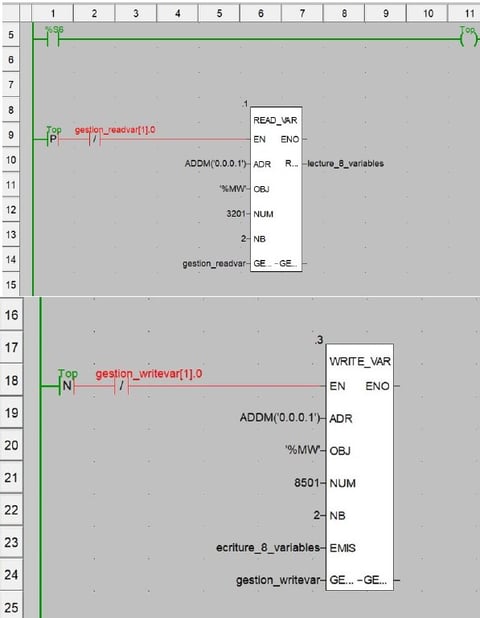
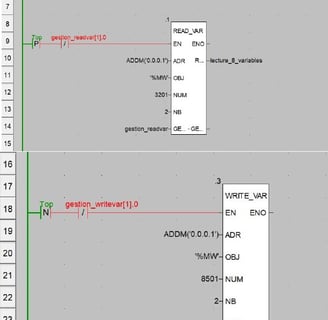
On utilise ensuite les fonctions READVAR et WRITEVAR. Ces dernières servent à lire et écrire des valeurs.
Également on y trouve nos adresses ADDM(‘0.0.0.1’) qui indique la voie 0 du rack 0 du port 0 et l’adresse 1 (adresse configurée dans le variateur) de l’automate.
Enfin on y retrouve différentes adresses logiques comme ici 8501 servants de commande que l’on retrouve dans des documentations techniques.
Remontée d'informations
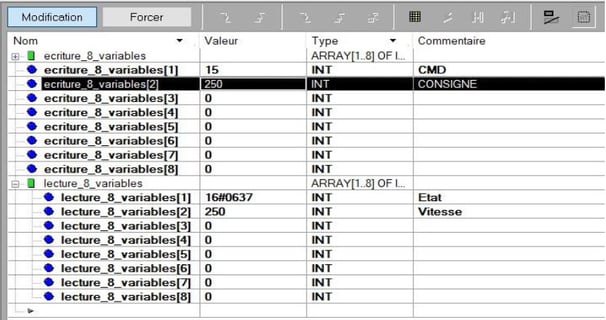
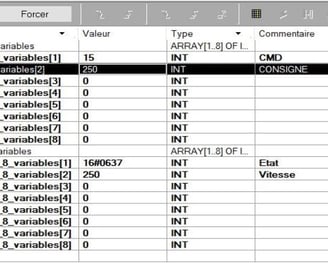
On initialise notre table d’animation (elle jouera le rôle d’écran de supervision) et on connecte notre programme à notre automate.


Dès lors on peut entrer dans écriture_8_variables (CMD) la série suivante : 0, 6, 7, 15.
Si la communication se fait bien on peut alors entrer dans écriture_8_variables (CONSIGNE) des valeurs de 0 à 500 (cela représente la fréquence du variateur multiplié par 10). Par exemple en entrant 250 en consigne on aura une fréquence de 25.0 Hz ainsi que notre moteur qui tourne.
Démarche réflexive
Ainsi lors de cette SAE, nous avons appris beaucoup de choses.
Tout d’abord nous avons à partir d’un cahier des charges réussi à concevoir une commande de moteur asynchrone avec variation de vitesse évolutive et un système de supervision. En effet, nous avons notamment découvert le câblage sur platine le tout sur un temps donné limité (2 semaines). Par ailleurs, en plus de mettre en pratique des compétences techniques nous avons également mis en pratique des compétences humaines tel que le travail d’équipe : nous nous sommes répartit efficacement le travail et nous sommes parvenu à faire fonctionner notre variateur du premier coup ce qui est une preuve de réussite pour nous.
Cependant nous avons rencontrer beaucoup de difficultés. En effet nous avons eu beaucoup de mal avec le câblage du relai de sécurité notamment par la grande variété des montages proposés par la documentation technique. Ensuite, nous avons perdu pas mal de temps à refaire des bonnes straps car la plupart n’étaient pas assez serré et lorsque l’on tirait sur les câbles, ces derniers s’enlevaient. Également nous avons perdu beaucoup de temps avec la liaison MODBUS car nous ne l’avions jamais vu auparavant.
Enfin, si nous devions refaire la SAE nous y ajouterions quelques améliorations tels qu’échanger le sectionneur et l’alimentation 24V de place, lire plus attentivement tous les documents donnés et de nous fixer des objectifs clairs afin d’avancer plus efficacement.